企業情報
製品情報
半導体搬送システム事業
ウェーハ搬送ロボットシリーズ
ウェーハ搬送装置シリーズ
半導体洗浄装置事業
ウェーハ洗浄装置シリーズ
研究・開発
採用情報
ニュースとイベント
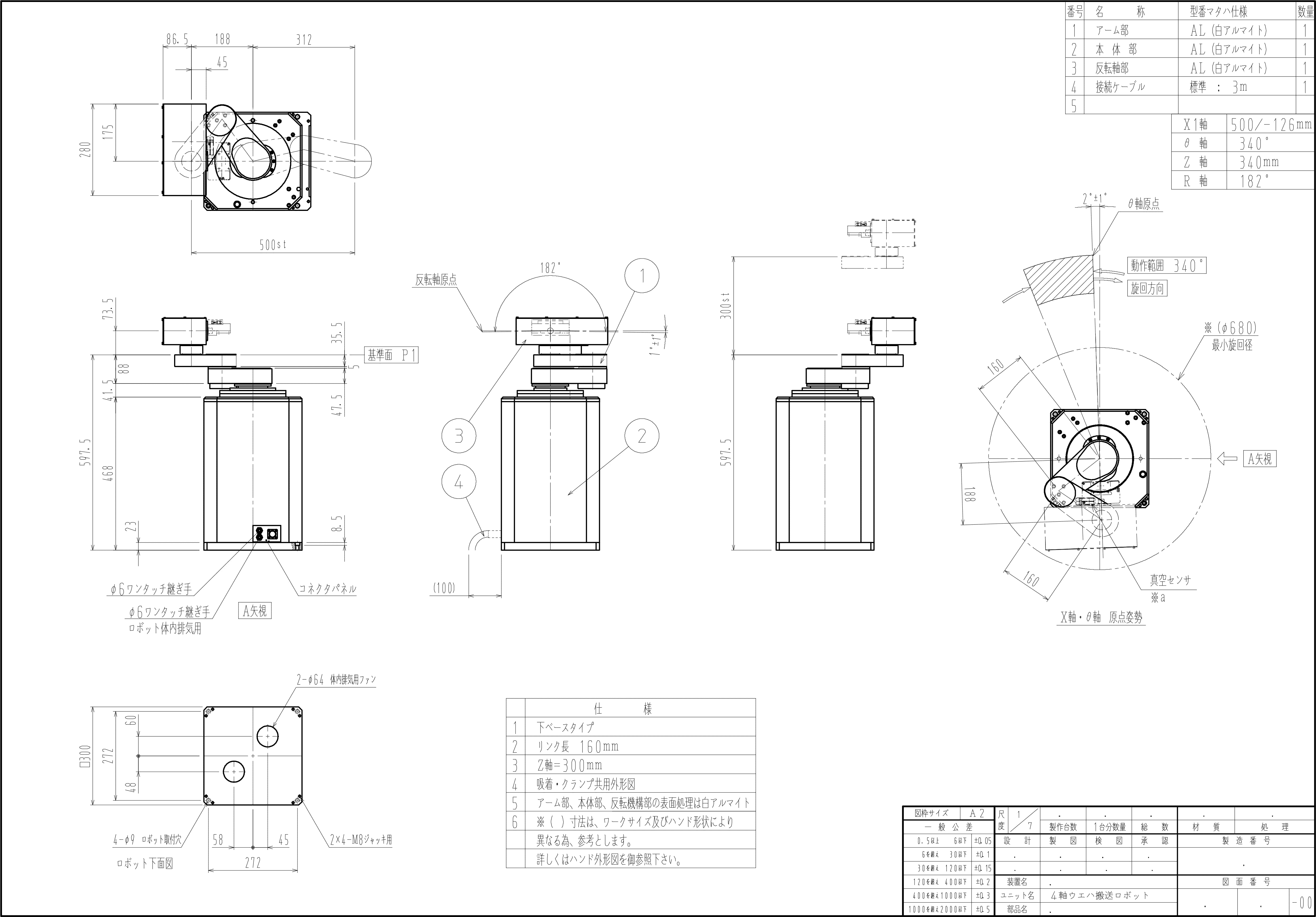
本製品は、クリーンルームで使用する水平多関節型のロボットです。前後(X軸)・旋回(θ軸)・上下(Z軸)+ハンド回転(0~180°)の動作が可能でウエハの大気中搬送に対応致します。駆動モータは、ACサーボモータで全軸アブソリュートエンコーダ仕様です。