製品情報


製品情報
半導体製造には,非常にクリーンな環境での高速搬送が求められる.当社で提供している半導体処理設備に用いられるウェーハ搬送装置も,そのような要求に応えるように他社に先駆けてさまざまな工夫がなされている.その高い信頼性と生産性はワールドワイドのお客さまから評価されています。最先端の業界スタンダード装置として、最先端技術と多様なニーズに対応すべく進化し続けています。

簡易的にウェーハを搬送したい
カセット内ワークの擦れを抑えたい
カセットステージ数、自動化、ワークサイズ等
装置メーカー例
エッチング装置・アッシング装置・洗浄装置・コーターデベロッパー・露光機等。

簡易的にウェーハを搬送したい
カセット内ワークの擦れを抑えたい
カセットステージ数、自動化、ワークサイズ等
装置メーカー例
エッチング装置・アッシング装置・洗浄装置・コーターデベロッパー・露光機等。
本装置は、Ø300mm(12″)石英ガラスウェーハを、ステージ①~ステージ②のキャリア間で自動的に枚葉で移載を行うシステムです。
使用するカセットは、FOUP・FOSBキャリアです。
基本的にキャリアは、作業者がステージにセットします。
空気洗浄度:ISO Class3(ISO-14644)


ステージ 1(ローダー)
ステージ 2(アンローダー)
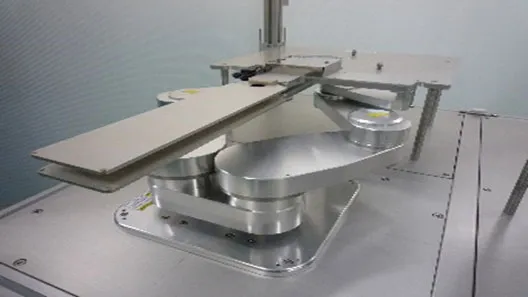
ウェーハ搬送ロボット