Products


Products
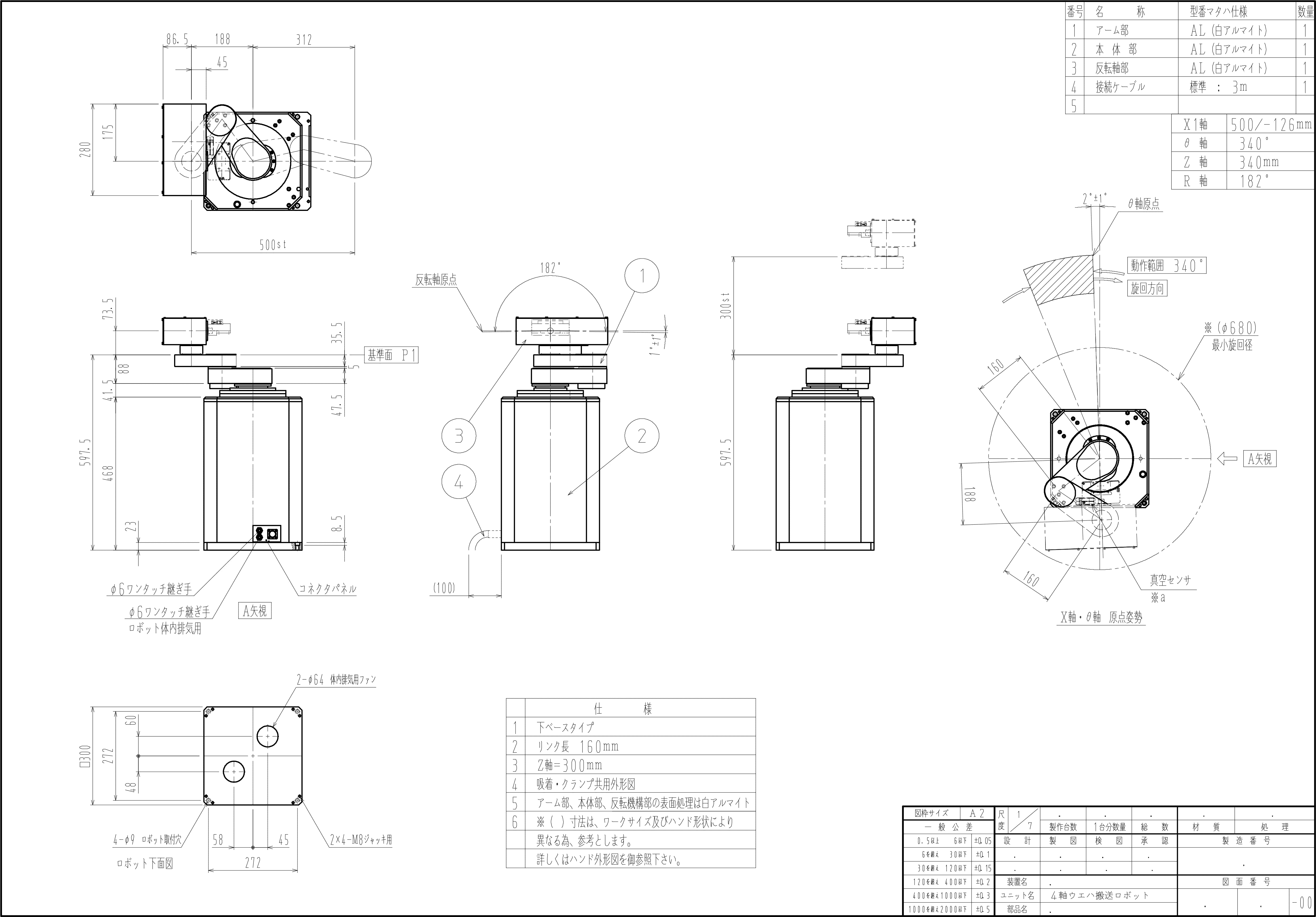
This product is a horizontal articulated robot used in clean rooms.
Back and forth (X-axis), swivel (θ-axis), up-and-down (Z-axis) + hand rotation (0 to 180°) operations are possible, supporting wafer transfer in the atmosphere. The drive motor is an AC servomotor with absolute encoder specifications for all axes.