기업 정보
제품 정보
반도체 이송 시스템 사업
웨이퍼 이송 로봇 시리즈
웨이퍼 이송 장비 시리즈
반도체 세척 장비 사업
웨이퍼 세척 장비 시리즈
연구・개발
채용 정보
뉴스 및 이벤트
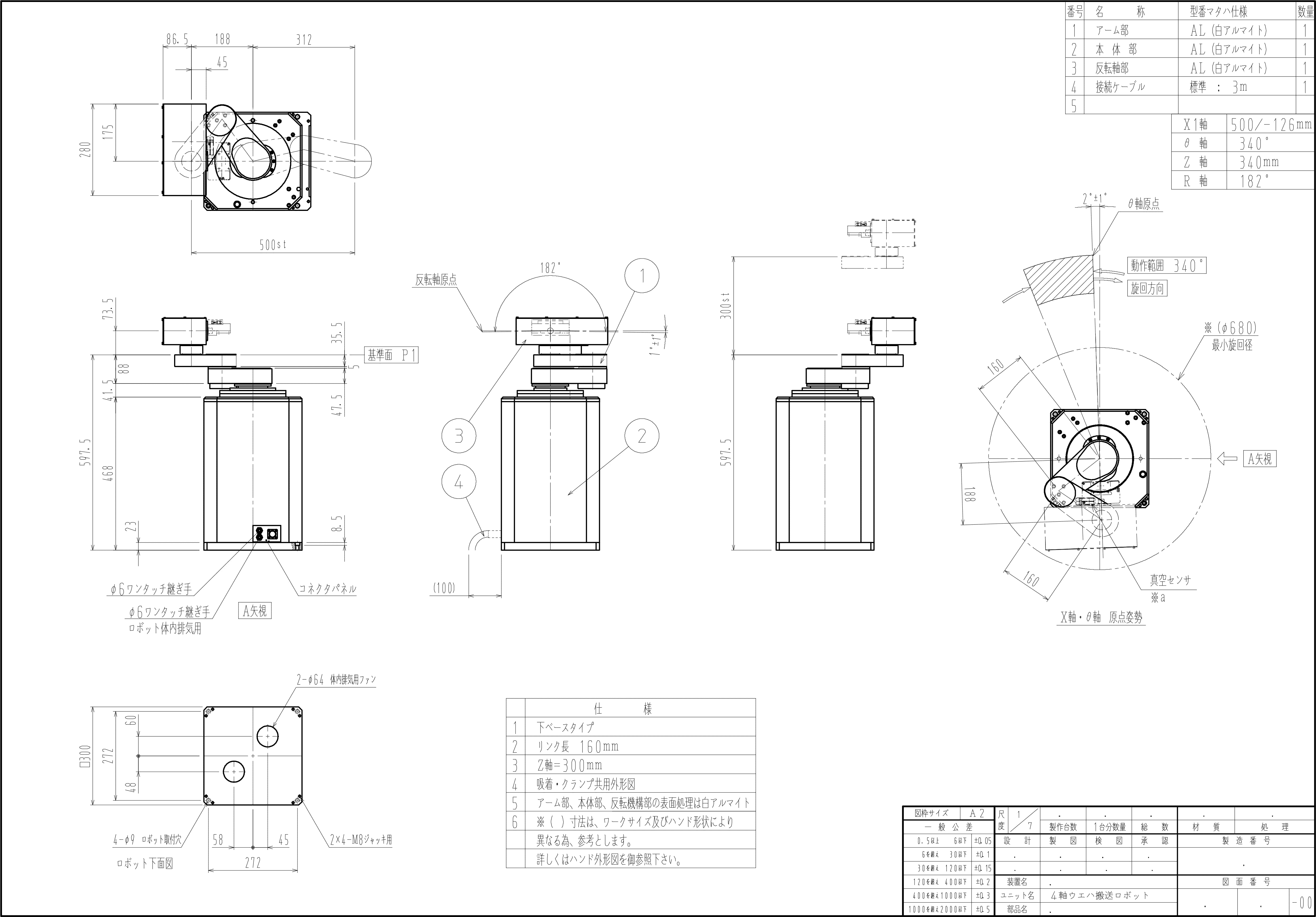
본 제품은 클린룸에서 사용하는 수평 다관절형 로봇입니다.전후(X축)・회전(θ축)・상하(Z축) + 핸드 회전(0~180°) 동작이 가능하며 웨이퍼의 대기 중 이송에 대응합니다. 구동 모터는 AC 서보 모터로, 모든 축은 절대 엔코더 사양입니다.