제품 정보


제품 정보
반도체 제조에는 매우 깨끗한 환경에서의 고속 이송이 요구됩니다. 당사가 제공하는 반도체 처리 설비에 사용되는 웨이퍼 이송 장치도 이러한 요구를 충족시키기 위해 타사에 앞서 다양한 혁신적인 노력이 이루어졌습니다. 그 높은 신뢰성과 생산성은 전 세계 고객들에게 평가받고 있습니다. 최첨단 업계 표준 장치로서, 최첨단 기술과 다양한 니즈에 대응하기 위해 끊임없이 진화하고 있습니다.

웨이퍼를 간단히 이송하고 싶습니다.
캐리어 내 워크의 마찰을 줄이고 싶습니다.
캐리어 스테이지 수, 자동화, 워크 크기 등
장치 제조업체 사례
에칭 장치, 애싱 장치, 세정 장치, 코터 디벨로퍼, 노광기 등.

웨이퍼를 간단히 이송하고 싶습니다.
캐리어 내 워크의 마찰을 줄이고 싶습니다.
캐리어 스테이지 수, 자동화, 워크 크기 등
장치 제조업체 사례
에칭 장치, 애싱 장치, 세정 장치, 코터 디벨로퍼, 노광기 등.
본 장치는 Ø300mm(12″) 석영 유리 웨이퍼를 스테이지①에서 스테이지②의 캐리어 간에 자동으로 매엽 방식으로 이송하는 시스템입니다.
사용하는 캐세트는 FOUP 및 FOSB 캐리어입니다.
기본적으로 캐리어는 작업자가 스테이지에 설치합니다.
공기 청정도: ISO Class3 (ISO-14644)


스테이지 1 (로더)
스테이지 2 (언로더
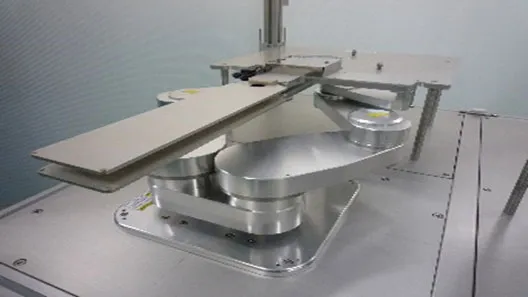
웨이퍼 이송 로봇